Requisitos de finalización
Sistema
Para poder introducir el concepto de modelo de un sistema, así como presentar los tipos de modelos
de simulación y sus principales características, es imprescindible definir previamente qué se entiende
por sistema.
Un sistema puede definirse como una colección de objetos o entidades que interactúan entre sí para
alcanzar un cierto objetivo. Nótese que la colección de objetos de un sistema puede ser tan solo un
subconjunto de los objetos que deberían ser considerados en un sistema si el objetivo que se
pretendiera alcanzar fuera otro.
Si se considera, por ejemplo, el estudio sobre el número de cajeros de que debe disponer un supermercado para ofrecer un buen servicio a sus clientes, los objetos del sistema consistirían principalmente en los clientes en espera de ser atendidos, y en los cajeros/as que realizan dicho servicio. En cambio, si se desea estudiar la atención a las necesidades de los clientes, el sistema debería contemplar adicionalmente entidades tales como los productos y su consumo.
Sin perder generalidad y considerando como finalidad de los experimentos tan solo el estudio del comportamiento de un sistema en el dominio temporal, se pueden clasificar los sistemas en: continuos, discretos, orientados a eventos discretos y combinados, atendiendo tan sólo a la relación entre la evolución de las propiedades de interés y la variable independiente tiempo.
Tipos de sistemas
- Sistemas continuos: las variables del estado del sistema evolucionan de modo continuo a lo largo del tiempo. Un ejemplo de este tipo de sistemas es la evolución de la temperatura en una habitación durante cualquier intervalo de tiempo, o bien la evolución del nivel de líquido en un tanque
- Sistemas discretos: se caracterizan porque las propiedades de interés del sistema cambian únicamente en un cierto instante o secuencia de instantes, y permanecen constantes el resto del tiempo.
- Sistemas orientados a eventos discretos: al igual que los sistemas discretos, se caracterizan porque las propiedades de interés del sistema cambian únicamente en una secuencia de instantes de tiempo y, podemos considerar que permanecen constantes el resto del tiempo.
- Sistemas combinados: aquellos que combinan subsistemas que siguen filosofías continuas o
discretas, respectivamente. Es el caso de los sistemas que poseen componentes que deben ser
necesariamente modelados según alguno de dichos enfoques específicos.
Modelos
Existen otras alternativas a las técnicas de simulación digital para imitar (simular) el comportamiento de un sistema. Alternativas típicas son la construcción de un prototipo a escala del sistema real (plantas piloto, procesos en miniatura,...), la representación analógica del sistema mediante circuitos eléctricos, la descripción cualitativa del sistema, o la analogía con otros sistemas físicos o biológicos, como podría ser la experimentación de drogas en animales para prever sus efectos en las personas. Todas estas técnicas tienen en común que, para imitar el comportamiento de un sistema, requieren (de algún modo) la descripción de las características internas (mecanismos) del sistema en cuestión para prever su respuesta. La descripción de las características de interés de un sistema se conoce como modelo del sistema, y el proceso de abstracción para obtener esta descripción se conoce como modelado.
Existen muchos tipos de modelos (modelos físicos, modelos mentales, modelos simbólicos) para representar los sistemas en estudio, pero puesto que uno de los objetivos para los cuales se van a desarrollar los modelos es su uso en entornos de simulación digital, es necesario que los modelos formalicen el conocimiento que se tiene del sistema de modo conciso, sin ambigüedades (interpretación única), y que puedan ser procesados por un ordenador.
Estas características determinan
el uso de modelos simbólicos matemáticos como herramienta para representar las dinámicas de interés
de cualquier sistema en un entorno de simulación digital. Los modelos simbólicos matemáticos
mapean las relaciones existentes entre las propiedades físicas del sistema que se pretende modelar en
las correspondientes estructuras matemáticas. El tipo de formalización matemática que se utilice va a
depender de las características intrínsecas de las dinámicas de interés que se quieran representar.
La descripción en términos matemáticos de un problema real no es una metodología de trabajo propia de la simulación digital, sino que es inherente a la mayoría de las técnicas que se utilizan para solventar cualquier tipo de problema, las cuales suelen seguir unas pautas que, de modo general, se han resumido en la figura siguiente:
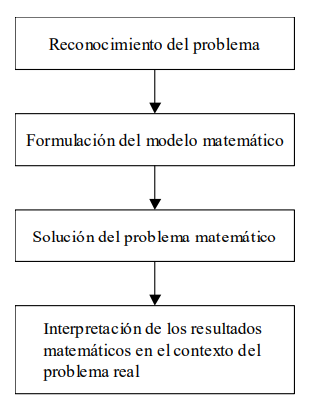
Aunque existe una gran diversidad de metodologías para el desarrollo de modelos matemáticos de
sistemas físicos, existen un conjunto de consideraciones que se deben tener en cuenta para garantizar una
representación eficiente del sistema real:
- Un modelo se desarrolla siempre a partir de una serie de aproximaciones e hipótesis y,
consecuentemente, representa tan sólo parcialmente la realidad.
- Un modelo se construye para una finalidad específica y debe ser formulado para que sea útil a dicho fin.
- Un modelo tiene que ser por necesidad un compromiso entre la simplicidad y la necesidad de recoger todos los aspectos esenciales del sistema en estudio.
Así pues, un buen modelo debe preservar ambas propiedades:
- Representar adecuadamente aquellas características del sistema que son de nuestro interés.
- Ser una representación abstracta de la realidad lo suficientemente sencilla como para facilitar su
mantenimiento, adaptación y reutilización.
Atendiendo a las características que debe poseer un buen modelo, así como los objetivos del estudio de
simulación, los modelos de simulación suelen clasificarse de diferentes formas:
Los Modelos Estáticos suelen utilizarse para representar el sistema en un cierto instante de tiempo; y en su formulación no se considera el avance del tiempo. A título ilustrativo, considérese un modelo matemático simple de cantidad de material en un almacén de una fábrica:
Stock = Stock inicial + Material entrada - Material consumido por la fábrica
Este tipo de modelos es muy útil cuando el sistema se encuentra en equilibrio (no evoluciona respecto al
tiempo). Si se cambia el punto de equilibrio alterando uno o más de los valores del sistema, el modelo
permite deducir el resto de los valores, pero no muestra la manera en que cambiaron.
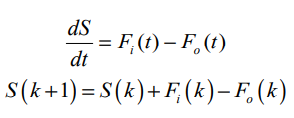
Los modelos dinámicos permiten deducir cómo las variables de
interés del sistema en estudio evolucionan respecto al tiempo. Un ejemplo de modelo dinámico es la
evolución de material en un stock, que depende de los flujos de entrada y salida, cada uno de los cuales
conlleva implícito la evolución del tiempo.
Evolución del stock = Flujo de entrada – Flujo de salida
Las ecuaciones siguientes describen matemáticamente la evolución de un stock suponiendo que las
variables de interés evolucionan de manera continua o discreta respectivamente, donde Fi y Fo representan
los flujos de entrada y salida del almacén.
Modelos deterministas, un modelo se denomina determinista si su nuevo estado puede ser completamente definido a partir del estado previo y de sus entradas. Es decir, ofrece un único conjunto de valores de salida para un conjunto de entradas conocidas.
Los modelos estocásticos requieren de una o más variables aleatorias para formalizar las dinámicas de interés. En consecuencia, el modelo no genera un único conjunto de salida cuando es utilizado para realizar un experimento, sino que los resultados generados son utilizados para estimar el comportamiento real del sistema.
Los modelos continuos se caracterizan por representar la evolución de las variables de interés de forma
continua. En general suelen utilizarse ecuaciones diferenciales ordinarias si se considera simplemente la
evolución de una propiedad respecto al tiempo, o bien ecuaciones en derivadas parciales si se considera
también la evolución respecto al espacio.
De modo análogo a la definición de modelos continuos, los modelos discretos se caracterizan por
representar la evolución de las variables de interés de forma discreta.
Es importante notar a partir de la clasificación de modelos realizada, que es posible describir un sistema
continuo mediante un modelo discreto y, al revés, también es posible describir un sistema discreto
mediante un modelo continuo.
La decisión de utilizar un modelo continuo o un modelo discreto depende
de los objetivos particulares de cada estudio y no tanto de las características del sistema. Así pues, por
ejemplo, es posible encontrar modelos continuos de flujos de coches en una autopista donde se ha
escogido una formulación continua cuando los objetivos del estudio se centran pongamos por caso en
evaluar la evolución de los flujos ante un accidente o bien cuando se recorta un carril, en que el
movimiento de un coche carece de importancia.
Antes de finalizar la presentación del concepto de modelo de un sistema, se introducen a continuación
otras definiciones igualmente válidas en el contexto de este libro, así como algunas de las características
que debe cumplir un buen modelo:
• Un modelo es un objeto o concepto que utilizamos para representar cualquier otra entidad (un
sistema). Así pues, mediante un proceso de abstracción, se muestran en un formato adecuado las
características de interés de un objeto (sistema) real o hipotético.
• Un modelo es una representación simplificada de un sistema que nos facilitará explicar, comprender,
cambiar, preservar, prever y posiblemente controlar el comportamiento de un sistema.
• Un modelo es el sustituto de un sistema físico concreto.
• Un modelo debe representar el conocimiento que se tiene de un sistema de modo que facilite su
interpretación, formalizando tan sólo los factores que son importantes para los objetivos de
modelado.
• Un modelo debe ser tan sencillo como sea posible, porque el desarrollo de modelos universales es impracticable y poco económico, siempre y cuando represente adecuadamente los aspectos de interés.
Modelos de simulación de eventos discretos
Los Modelos de eventos discretos son modelos dinámicos, estocásticos y discretos en los que las
variables de estado cambian de valor en instantes no periódicos del tiempo. Estos instantes de tiempo se corresponden con la ocurrencia de un evento. Por tanto, un evento se define como una acción
instantánea que puede cambiar el estado del modelo.
Otros elementos de interés de los modelos de eventos discretos son:
• Actividades: son las tareas o acciones que tienen lugar en el sistema. Están encapsuladas entre dos
eventos. Por ejemplo, la reparación de una máquina, el procesado de una pieza o el transporte de
un cliente. Las actividades generalmente tienen duración temporal y, normalmente, precisan del
uso de recursos.
• Entidades: son el conjunto de objetos que constituyen o fluyen por el sistema. Pueden ser
temporales o permanentes. En la bibliografía a menudo se emplea el concepto de entidad para
aludir sólo a las entidades temporales, aunque en este libro el concepto es más amplio dado que
también incluye a los recursos que nos permiten mantener la coherencia con los múltiples
formalismos empleados en el proceso de abstracción del sistema.
• Entidades temporales: son los objetos que se procesan en el sistema, como por ejemplo las piezas,
los clientes o los documentos. Entidades diferentes pueden tener características diferentes que
denominaremos atributos: por ejemplo, precio, prioridad, estado o tamaño. Las entidades
temporales son los objetos que llegan, se procesan y salen del sistema.
• Recursos o entidades permanentes: son los medios gracias a los cuales se pueden ejecutar las actividades. Los recursos definen quién o qué ejecuta la actividad. Los recursos pueden tener características como capacidad, velocidad, averías y reparaciones o tiempo de ciclo. Ejemplos de recursos son las máquinas, los elementos de transporte o las personas.
Alternativas en la simulación de modelos de eventos discretos
Resumiendo algunos de los conceptos introducidos en las secciones anteriores, el modelo de un sistema representa las dinámicas de interés del sistema en un estudio particular, y la simulación consiste en realizar un experimento sobre el modelo del sistema de tal modo que los resultados generados por el simulador permitan prever con cierta exactitud los resultados que se obtendrían realizando el mismo experimento sobre el sistema real. Con el objetivo de ilustrar diferentes alternativas para experimentar con el modelo de simulación de un sistema orientado a eventos discretos, considérese el sistema de procesado de órdenes ilustrado en la siguiente figura, donde las tres actividades más significativas del sistema en estudio son: la recepción, el procesado y finalmente la expedición de las órdenes recibidas. Se considera que hay cuatro trabajadores por cada turno diario de 8 horas y que la franja horaria normal de trabajo es desde las 9 de la mañana hasta las 5 de la tarde. No obstante, la jornada laboral se alarga si no ha sido posible expedir todas las órdenes recibidas a lo largo del día.
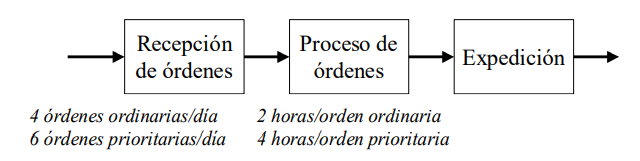
Los parámetros más significativos del sistema son:
• En promedio, se reciben 10 órdenes cada día.
• Hay dos tipos de órdenes, las ordinarias y las prioritarias: el 40% de las órdenes son ordinarias y
el 60% restante son prioritarias.
• En promedio, una orden ordinaria requiere 2 horas de proceso y una orden prioritaria 4 horas.
• Solo se aceptan órdenes hasta la 1 del mediodía.
Simulación del modelo estático
A partir de una formulación estática del sistema en la que no interviene directamente el tiempo
(basada en valores promedio), es posible analizar el comportamiento del sistema llegando a
conclusiones erróneas, como que no existe ningún retraso en las órdenes y que los recursos humanos
están aprovechados en un 100%:
órdenes ordinarias = 4 órdenes/día * 2 horas/orden = 8 horas/día
órdenes prioritarias = 6 órdenes/día * 4 horas/orden = 24 horas/día
capacidad necesaria = 8 + 24 = 32 horas/día
capacidad disponible = 4 trabajadores/día * 8 horas/día = 32 horas/día
porcentaje de utilización = capacidad necesaria/cap. disponible * 100=100%
Simulación a mano
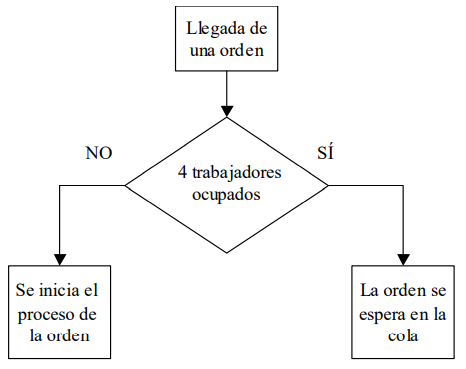
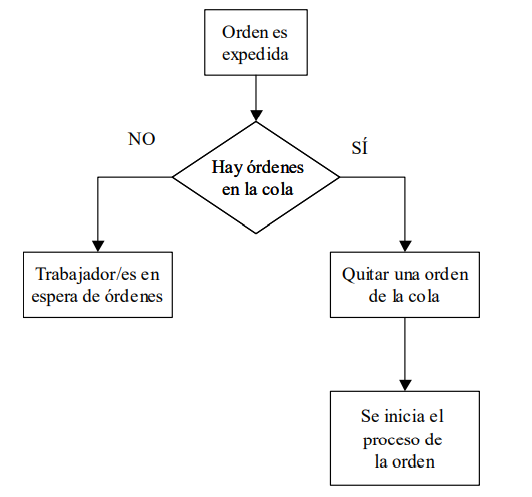
Para realizar una simulación del modelo orientado a eventos discretos (modelo de simulación estocástico y discreto) es necesario formalizar los distintos eventos que afectan a las variables de interés del estudio, los instantes de tiempo en que pueden aparecer dichos eventos, así como las actividades que deben realizarse como consecuencia de la aparición de dichos eventos. En la siguiente figura se muestra en forma de organigrama las acciones asociadas al evento de llegada de una orden. Si todos los trabajadores están ocupados, la orden se espera en la cola. En caso contrario, se asigna un trabajador a la orden y se inicia su proceso.
En la siguiente figurase representan las acciones ligadas al evento de expedición de una orden. Al finalizar el proceso de una orden, uno de los trabajadores queda libre. Si hay órdenes en cola, el trabajador selecciona la orden más prioritaria e inicia su procesado. En caso contrario, el trabajador permanece a la espera de la llegada de nuevas órdenes.
Para analizar el comportamiento del sistema se simula la dinámica del proceso en el cual la llegada de órdenes es aleatoria. La figura siguiente muestra para cada una de las órdenes la hora de llegada, el tiempo que está en cola, el tiempo de procesado y la hora de expedición.
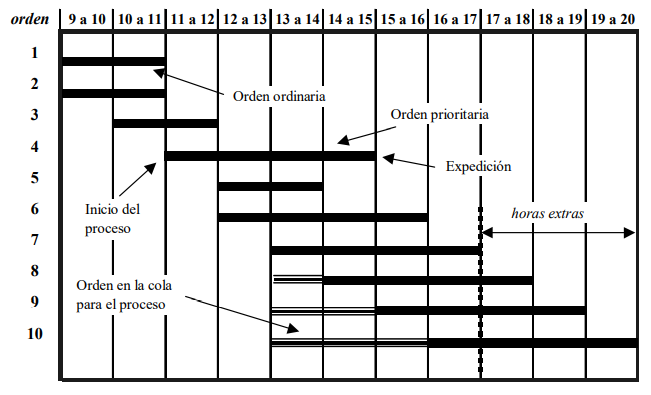
Las primeras dos órdenes llegan a las 9 de la mañana. La tercera orden llega una hora más tarde, a las
10 de la mañana. Dado que estas primeras órdenes son ordinarias y hay trabajadores para procesarlas,
las tres órdenes son expedidas al cabo de dos horas. Más adelante, a las 13 horas, llega la orden
número 8. En este instante, los cuatro trabajadores están ocupados. En consecuencia, no se puede
iniciar su proceso hasta una hora más tarde después de ser expedida la orden número 5. Para
completar las órdenes 8, 9 y 10 es preciso que 3 trabajadores alarguen su jornada de trabajo más allá
de las 5 de la tarde.
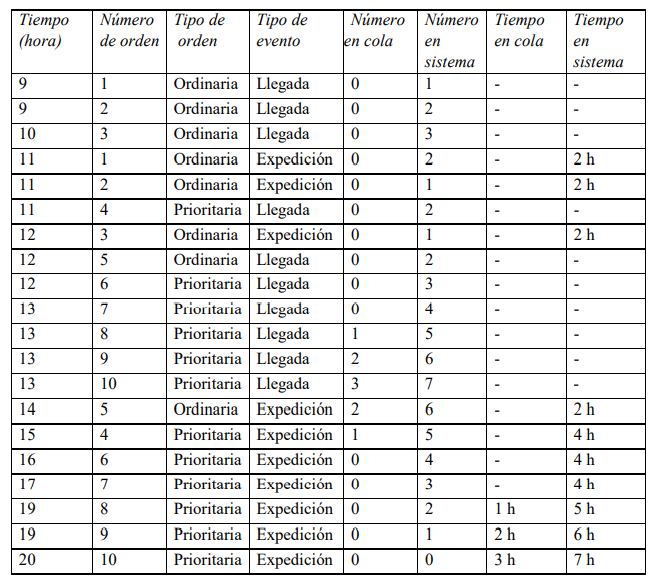
A continuación se muestra también de forma tabular los resultados de la simulación a mano. La
primera columna muestra en qué instante ocurre cada evento. En la cuarta columna se muestra el tipo
de evento, evento de llegada de una orden o evento de expedición de una orden. En la columna
número dos se muestra la orden que se recibe o expide y en la siguiente columna, la tercera, se
muestra el tipo de orden, ordinaria o prioritaria. En la quinta columna se muestra en número de
órdenes en la cola. En la sexta columna se muestra el número de órdenes en el sistema (desde que
llega la orden hasta que ésta es expedida). La penúltima columna muestra el tiempo que está cada
orden en la cola a la espera de ser procesada. La última columna muestra, en el evento de expedición,
el tiempo total que ha estado la orden en el sistema, o sea, la suma del tiempo en la cola más el tiempo
en proceso.
Las últimas cuatro columnas muestran estadísticas importantes para analizar el comportamiento del sistema. Estas estadísticas son recogidas cada vez que hay un evento. Por ejemplo, el número de órdenes en la cola alcanza su valor máximo a las 13 horas. Las últimas tres órdenes están en la cola una, dos y tres horas respectivamente.
A continuación se resume el comportamiento del proceso observado mediante la simulación manual:
tiempo de ciclo promedio para órdenes ordinarias = 8 h/4 órdenes = 2 h/orden
tiempo de ciclo promedio para las prioritarias = 30 h/6 órdenes = 5 h/orden
tiempo promedio en la cola = 6 h/10 órdenes = 0.6 h/orden
tiempo máximo en la cola = 3 h
nivel de servicio promedio = 7 órdenes a tiempo / 10 órdenes = 70%
3 trabajadores han tenido que trabajar un total de 6 horas extras para completar las órdenes
Aunque inicialmente parecía que el diseño del proceso era el adecuado, las llegadas aleatorias
provocan colas y retardos posteriores en el procesado de las órdenes. En este ejemplo se ha observado
que las llegadas aleatorias provocan desviaciones significativas respecto al comportamiento esperado
inicialmente.
Para efectuar la simulación anterior, se ha supuesto conocido el número de órdenes que llegan en cada
franja horaria. Sin embargo, en la práctica diaria, esta secuencia precisa de tiempos puede no ser
conocida dado que:
• el proceso simulado todavía no existe en la realidad,
• o se desea simular el comportamiento de un sistema real según condiciones diferentes de operación.
Aunque no se disponga de la información anterior, sí que, en general, se dispone de información sobre
la distribución del número de órdenes que llegan cada hora. En este caso, la información pudo ser
obtenida de forma precisa a partir de una muestra real o de forma aproximada a partir del
conocimiento de que se disponía del sistema.
Se supone conocida la probabilidad de que en una hora determinada lleguen 1, 2, 3 o 4 órdenes. La
distribución de probabilidades se muestra en la tabla siguiente
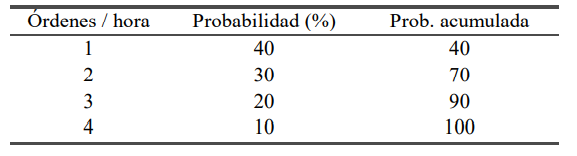
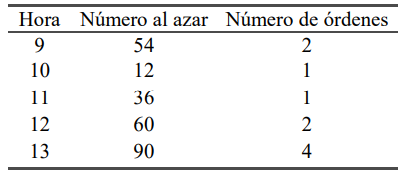
Una forma de simular cuál será el tiempo de proceso de la siguiente orden de trabajo consiste en introducir 100 bolas en un saco, numeradas de la 01 hasta la 100, y sacar una al azar. Si el valor extraído está comprendido entre el 01 y el 40, el número de órdenes será 1. Si está comprendido entre el 41 y el 70, llegarán 2 órdenes, si está comprendido entre el 71 y el 90, llegarán 3, y si está comprendido entre el 91 y el 100, llegarán 4 órdenes. Para proseguir, se vuelve a colocar la bola extraída en el saco y se procede de forma exactamente igual para obtener el número de órdenes de la hora siguiente. Nótese que, dado que del total de bolas, 40 están comprendidas entre los valores 01 y 40, la probabilidad de que el número de órdenes sea 1 será de 0.4 (40%).
Última modificación: lunes, 31 de agosto de 2020, 18:52